22+ Planning Graph Mutex
Web There are two types of binary mutual exclusion relations called mutex in Graphplan. Web graph cannot be achieved by any plan.
Planning
It gives us a necessary but insufficient condition for when the.
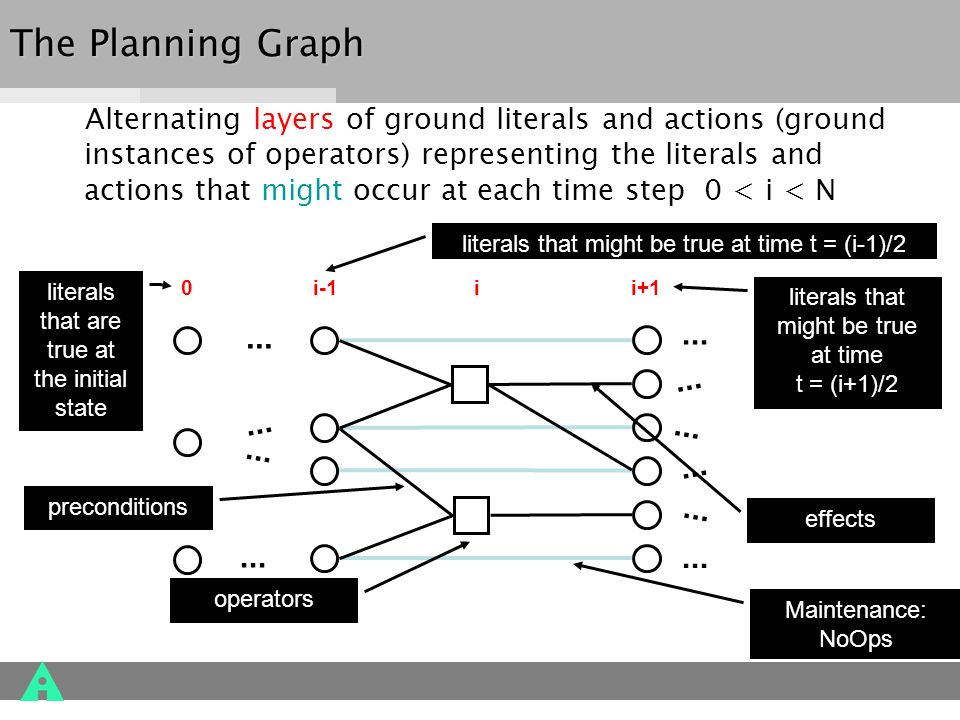
. These are the types of. There are two main parts. Persistence actions small boxes represent the fact that one literal is not modified.
These are the. The level cost of a goal literal is the first level it appears eg 0 for cleanhands and 1 for dinner. 8 The Planning Graph for the Flashlight Figure 220 shows the planning graph for Example 26In the first layer expresses the initial state.
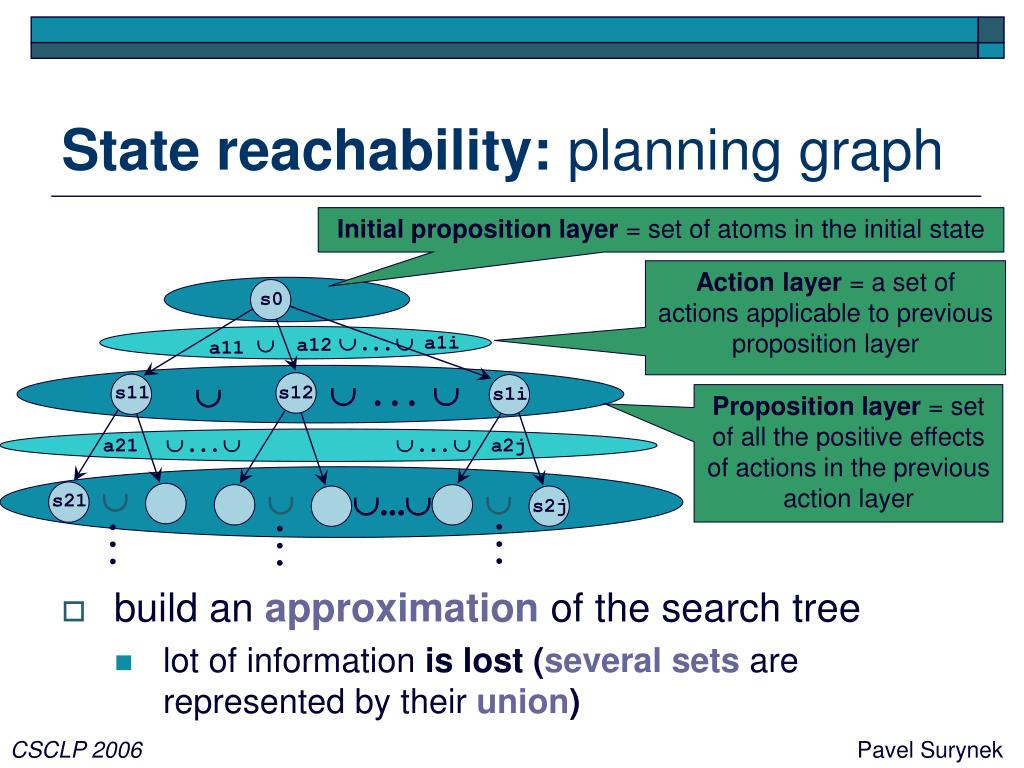
Create a planning graph that contains k levels Check whether the planning graph satisfies a necessary but insufficient condition for plan existence If it. Web What does a Planning Graph consist of. Web PDF We present an approach to representing large sets of mutual exclusions also known as mutexes or mutex constraints.
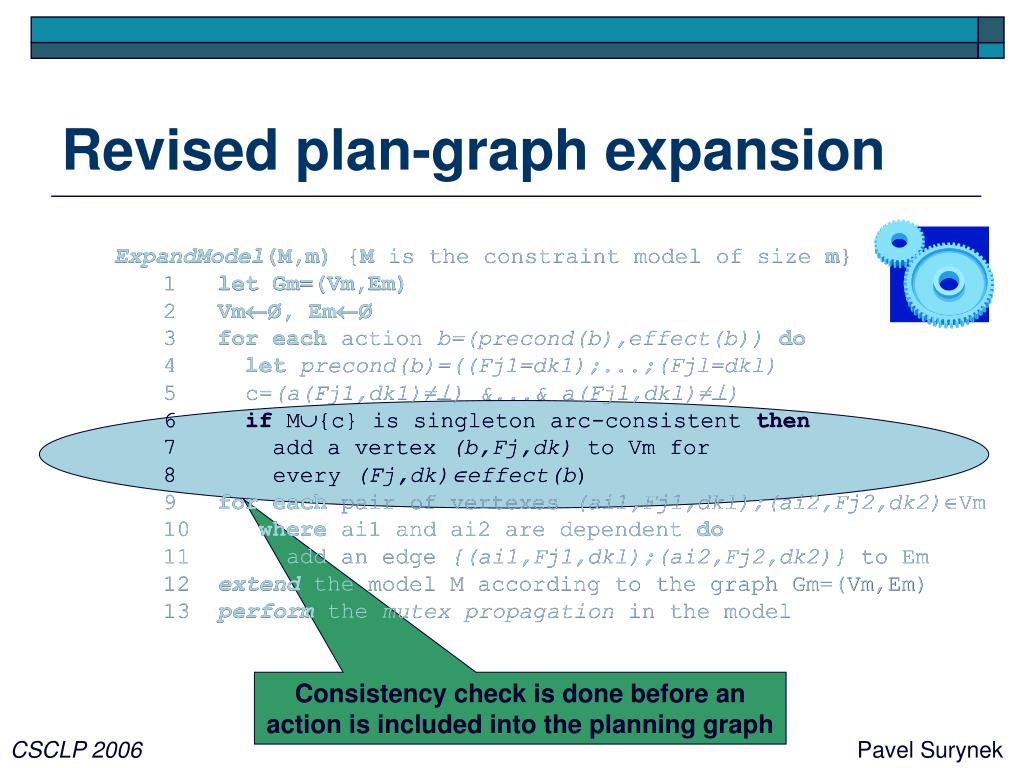
Web The GRAPHPLAN Algorithm Extract a solution directly from the PG function GRAPHPLANproblem r eturn solution or failure graph INITIAL-PLANNING. We deal with the search process of the GraphPlan algorithm in this paper. Explanation Level A0 contains all the actions that could occur in state S0.
A conflict is called a. The actions in the pair can be. In this paper we propose a.
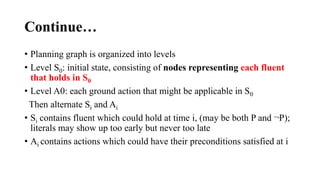
They are marked between actions at the action levels S0 S1 etc. Cont Example cont The GRAPHPLAN Algorithm Algorithm is used to extract a plan directly from the planning graph Contains. Initial state consisting of nodes representing each fluent that holds in S0 Level A0.
Web Planning Graph was developed to solve the issues in complexity found in the classical AI Planning approaches aka STRIPS-like planners. Level cost is an admissible heuristic but. Web Planning graph 2 Planning graph is organised into levels Level S0.
The only applicable operator. They are marked between actions at the action levels. Literal proposition shown with circles action shown with squares Every two layers.
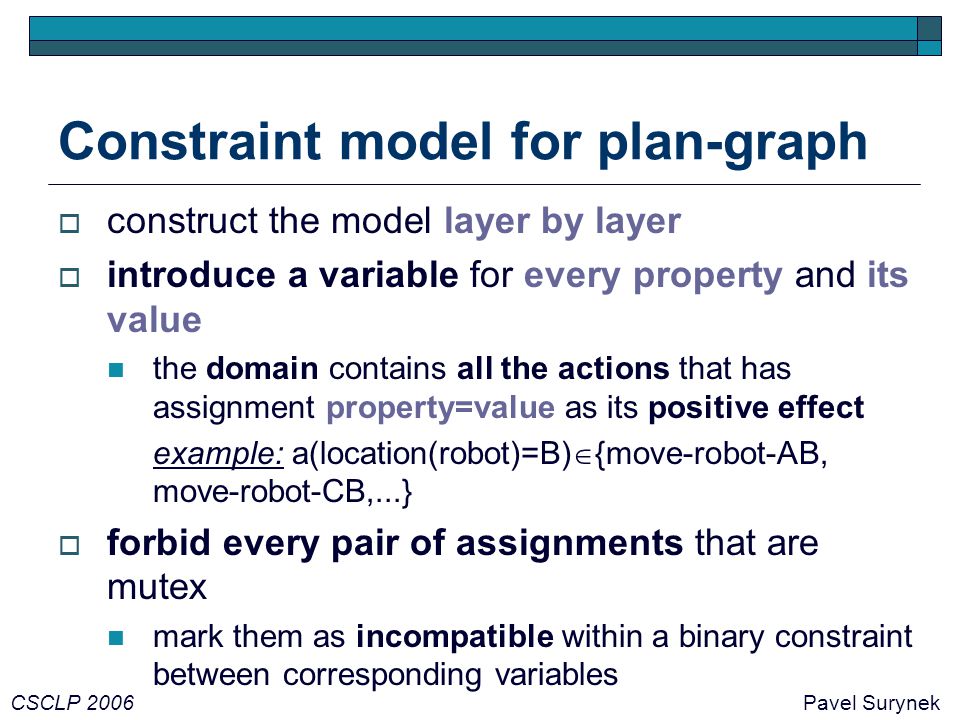
Mutexes between pairs of actions. We concentrate on a problem of finding supports for a sub-goal which arises. Two kinds of layers alternate.
Web A planning graph The red lines show mutex relationships Those are the literals and actions that are mutually exclusive ie cannot appear at the same time. Each ground action that might. Web The size of these constraints for a given problem can be overwhelming enough to present a bottleneck for the solving efficiency of the underlying solver.
Web The planning graph captures information about pairs of mutually exclusive actions and propositions. Web 091819 - We present an approach to representing large sets of mutual exclusions also known as mutexes or mutex constraints. Mutexes between pairs of actions.
During the construction of the planning graph information about the conflict between operators and literals within a layer is maintained.
Constraint Based Reasoning Over Mutex Relations In Graphplan Algorithm Pavel Surynek Charles University Prague Czech Republic Ppt Download

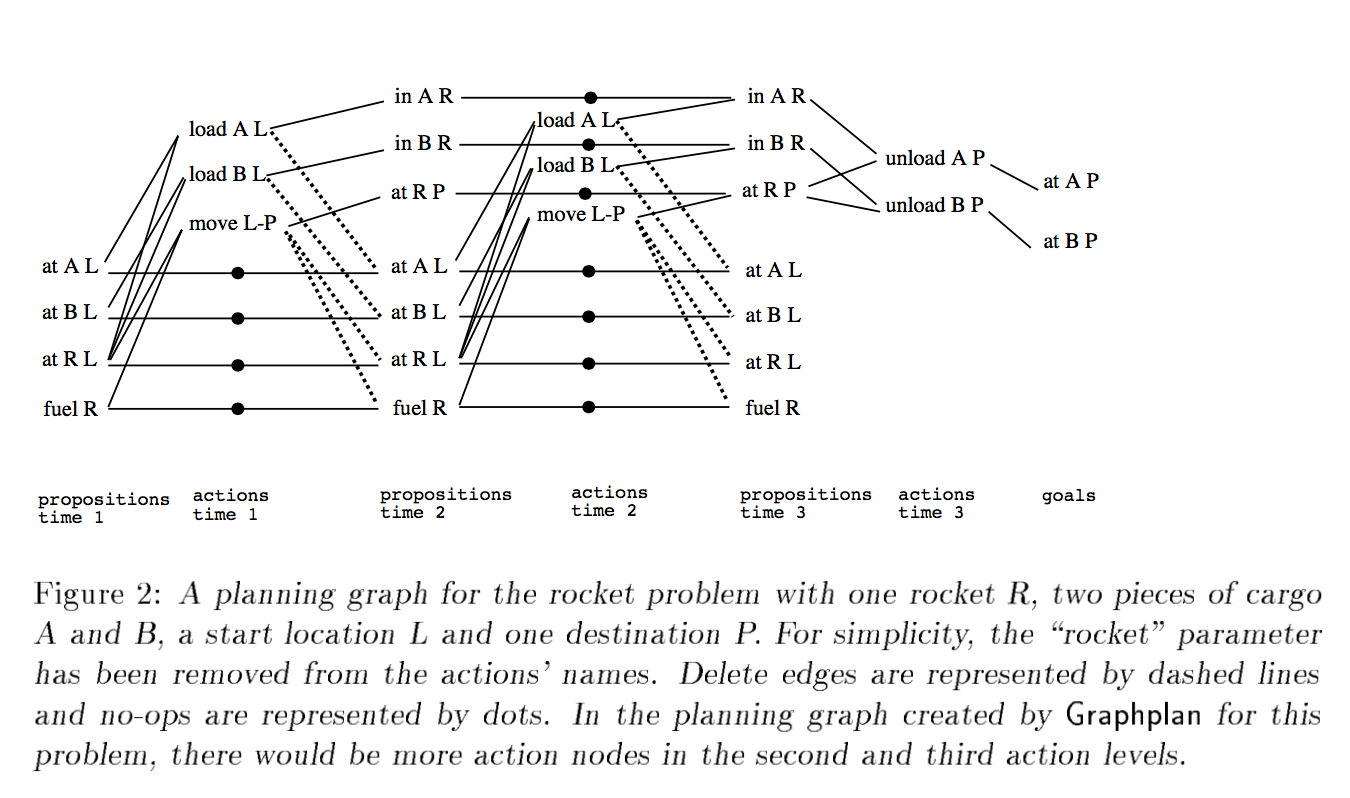
A Portion Of The Planning Graph For A Simple Rocket Problem With One Download Scientific Diagram
Ppt Constraint Based Reasoning Over Mutex Relations In Graphplan Algorithm Powerpoint Presentation Id 4848387
Ppt Constraint Based Reasoning Over Mutex Relations In Graphplan Algorithm Powerpoint Presentation Id 4848387
Constraint Based Reasoning Over Mutex Relations In Graphplan Algorithm Pavel Surynek Charles University Prague Czech Republic Ppt Download

4 8 Aiplan Planning Graph Heuristics Youtube

Figure 11 14 From 1 1 The Planning Problem Semantic Scholar
Classical Planning And Graphplan Classes 17 And 18 All Slides Created By Dr Adam P Anthony Ppt Download

Pdf Fast Planning Through Planning Graph Analysis Semantic Scholar
Ppt Constraint Based Reasoning Over Mutex Relations In Graphplan Algorithm Powerpoint Presentation Id 4848387

Deadlock Free Mutexes And Directed Acyclic Graphs Bertptrs Nl
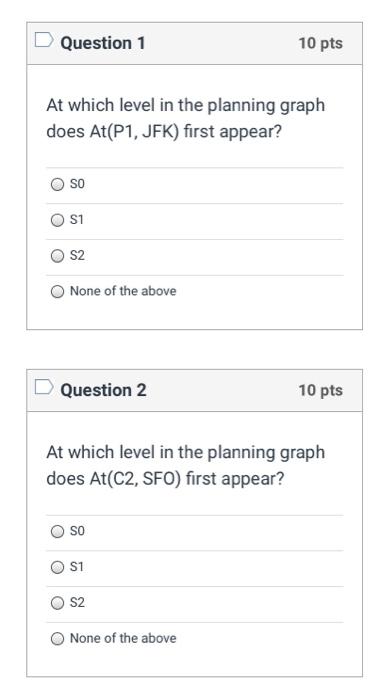
Solved Consider The Air Cargo Transportation Planning Chegg Com

The Planning Graph Of Graphplan The Actions A And B Are Mutually Download Scientific Diagram
Classical Planning 4 Learning Planning Graph

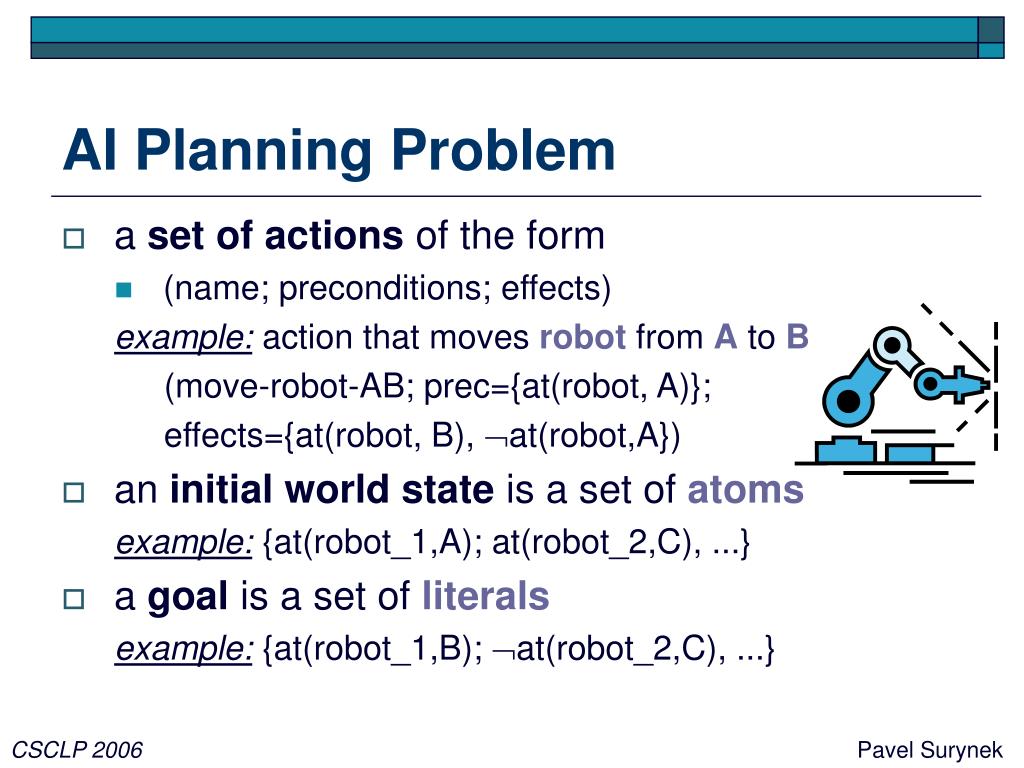
Planning
An Introduction To Planning Graph Ppt Download
Ppt Constraint Based Reasoning Over Mutex Relations In Graphplan Algorithm Powerpoint Presentation Id 4848387